|
Training Virtual reality-based surgical simulation relies on the ability to reproduce the sensations felt when using a surgical tool to interact with anatomy. Haptic interfaces allow a surgeon to manipulate a model of a patient's anatomy with a virtual surgical instrument, and can render force feedback at the same time to recreate the sensation of touch. Endoscopic sinus surgery is a technically challenging procedure that could benefit from a virtual surgical rehearsal environment. Important structures near the surgical field, such as the orbit, optic nerve, carotid artery, and cranial vault, are at risk for injury. This difficulty is compounded by the fact that the surgical workspace is extremely small and the anatomic variability between patients in the sinus area is high. Surgical simulation for rehearsal would assist the surgeon to attain the thorough pre-operative understanding of the patient's anatomy necessary to ensure a successful outcome. |
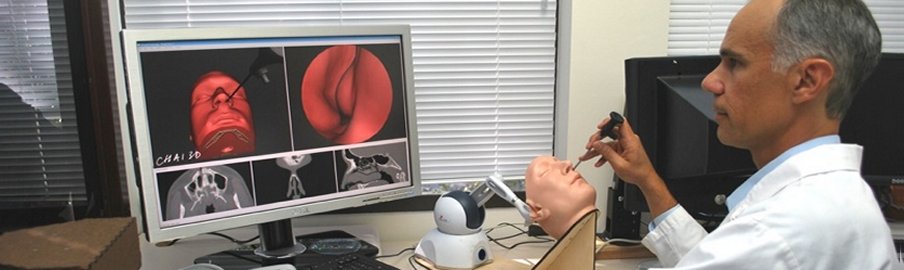
CHAI3D was used as the platform for developing Stanford's patient-specific endoscopic sinus surgery simulation system. The simulator is capable of taking a pre-operative clinical CT scan and constructing a virtual 3D model of the patient's anatomy on the fly. A haptic interface (SensAble PHANTOM Omni®) permits intuitive navigation of a virtual surgical endoscope through the nasal cavity while the software provides continual visual and force feedback. A virtual surgical instrument can also be controlled for manipulation and removal of tissue. Surgically relevant anatomy can be seen clearly during simulation, and can accurately predict what may be encountered in the operating room. Reference Integration of patient-specific paranasal sinus computed tomographic data into a virtual surgical environment, Parikh S, Chan S, Agrawal S, et al., American Journal of Rhinology, 2009. |